OTROS
Los sistemas operativos son tantos y tan desconocidos muchos de ellos, que no todos tienen una categoría definida.
En esta sección entran todos los sistemas operativos que no entran en las otras categorías.
Amoeba
Es un sistema operativo distribuido iniciado en 1981 en la universidad de Vrije (Holanda) por Andrew Tanenbaum, creador de Minix.
El objetivo del proyecto era poder tener una plataforma de cálculo paralelo (múltiples procesadores) y distribuido en el que el usuario no se loguea en una maquina en particular, sino en el sistema entero, edita programas, los compila, lee su mail, etc.
Estas acciones hacen intervenir diferentes maquinas, proceso totalmente transparente para el usuario, pero no existe un "host" que lo controle todo. Todo se efectúa en una máquina cualquiera, siempre buscando la que se encuentre con menos carga.
Está basado en Minix, por lo que es un sistema con Microkernel y se creó un lenguaje específico que tiene en cuenta el paralelismo y la distribución, llamado Orca. Existen versiones para varias plataformas, incluyendo i386, Sun-3 y SPARC.
El lenguaje de programación Python fue originalmente desarrollado para esta plataforma. El desarrollo parece detenido, dado que la fecha de la última modificación en el código data de febrero de 2001.
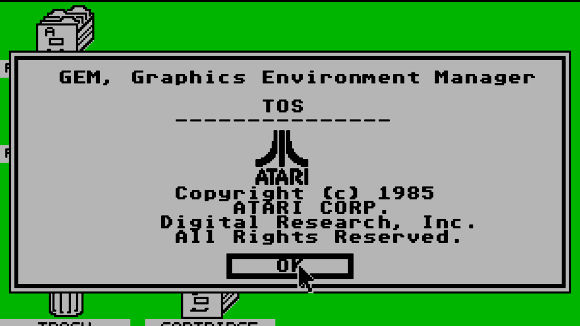
Atari TOS
The Operating System (TOS) es el sistema operativo de la gama de ordenadores Atari ST. Esta gama incluye el 520ST, el 1040ST y las variantes F, FM y E (ej. 1040STE). Posteriormente, las máquinas de 32 bits (TT030 y Falcon) fueron desarrolladas usando una nueva versión de TOS, llamada MultiTOS, la cual permite multitarea. Más recientemente, los usuarios han evolucionado TOS dando lugar a FreeMiNT.
Cuando el primer modelo de ST fue lanzado en 1985, Atari había desarrollado un sistema operativo principalmente basado en componentes ya existentes.
El núcleo de este nuevo SO consistía en gran parte en CP/M, originalmente desarrollado por Gary Kildall y a menudo considerado como el primer SO multiplataforma.
Los primeros modelos de ST cargaban el TOS 1.0 desde un disquete, pero Atari pronto comenzó a suministrar los ST con el TOS en un chip ROM. La ventaja era que la carga del sistema era extremadamente rápida, y al no ser necesaria su carga en RAM, dejaba más espacio para las aplicaciones.
En cambio, era complicado realizar actualizaciones, teniendo que sustituir físicamente el chip de ROM, por lo que los errores en el SO se tienen que parchear en cada arranque.
Kildall separó las partes que se comunicaban directamente con el hardware y las ubicó en un módulo que llamó BIOS. Esto aseguraba que el sistema podría ser fácilmente adaptado a otras plataformas, sin necesitar una gran reescritura del núcleo completo del SO.
La versión M68K del CP/M que Atari adaptó para su gama ST es conocida como GEMDOS. Este incluye el nivel superior en el TOS, mientras que las tareas de nivel más bajo son manejadas mediante el BIOS y el XBIOS. Este último funciona como un nivel intermedio, el cual incluye rutinas que el SO necesita internamente, como la gestión de interrupciones y el ajuste de la pantalla.
Añadió GEM como GUI de GEMDOS. Originalmente desarrollado por la compañía de Kildall, Digital Research, GEM consta de dos capas: AES (Application Environment Service) y VDI (Virtual Device Interface). Mientras que VDI se encarga del bit blit, el dibujado y el rellenado, el AES es el nivel superior en el GEM y, como tal, provee las funciones de re/dibujado de las ventanas y los diálogos.
Mientras se trabaja en una aplicación GEM se pueden tener hasta 6 accesorios abiertos de manera concurrente. Esto permite un tipo primitivo de multitarea cooperativa. Debido a que los programas escritos para GEM tienen que devolver el control al AES cuando están inactivos (esperando la entrada del usuario), este modo de multitarea funciona muy bien. Si aun así un proceso concreto quisiera realizar una tarea muy intensiva para el procesador o esperar la entrada del usuario, cualquier otro proceso pasaría a ser inaccesible hasta que la tarea sea finalizada.
Los programas TOS, a diferencia de los programas GEM, pueden autoiniciarse situándolos en una carpeta llamada AUTO. A partir de la versión 1.4 del TOS se permite iniciar automáticamente programas GEM desde el diálogo de Instalar Aplicación.
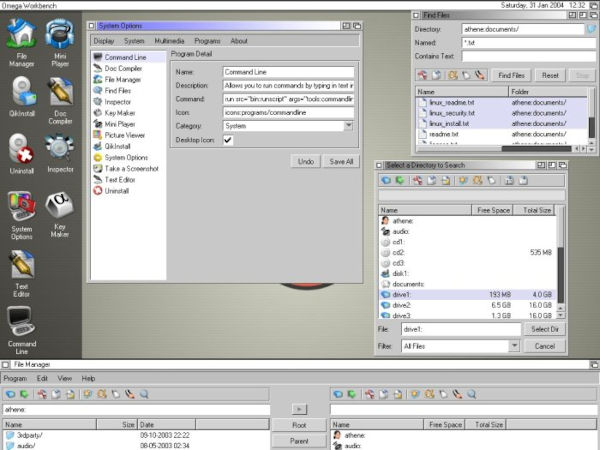
Athene
Es un sistema operativo basado en la filosofía de orientación a objetos desarrollado para su uso en PCs y sistemas embebidos con el máximo soporte posible para hardware y software, además de querer ser muy adaptable a las necesidades concretas de cada implementación particular.
Un dato curioso a tener en cuenta es que su interfaz de usuario es totalmente reeimplementable, y puede simular la interfaz de cualquier otro sistema operativo como Windows[1] o Amiga[2].
Por el momento una versión no comercial y gratuita que funciona bajo Windows y GNU/Linux[3] se encuentra disponible para libre descarga desde la web del proyecto, y se está trabajando en la versión comercial.
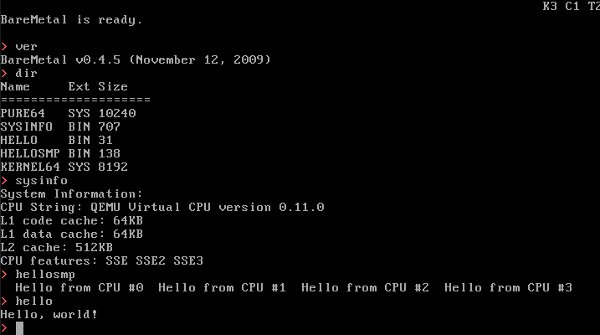
Baremetal
Nace en el 2010 un sistema operativo llamado Baremetal, un sistema operativo libre de 64 bits para arquitecturas x86-64.
La característica principal es que está escrito en ensamblador y las aplicaciones pueden desarrollarse en ensamblador o en C/C++, al igual que Kollibri OS, lo que lo hace muy rápido y a su vez que ocupe poco espacio, tan solo 16384 bytes.
Baremetal dispone de una interfaz de líneas de comando que permite al usuario cargar datos o programas desde un disco duro. La creación de este sistema se basó en MikeOS, un sistema de 16 bits escrito en Ensamblador, que se utilizaba como una herramienta de aprendizaje para ver el funcionamiento de un sistema operativo sencillo.
El desarrollo del sistema se basa en tres puntos fundamentales:
- Computación de alto rendimiento. Actúa como un cluster de HPC. Es ideal para el funcionamiento de sistemas mono-tareas.
- Aplicaciones incorporadas. Proporciona una plataforma para aplicaciones que se ejecuten en sistemas x86-64.
- Educación. Es un muy buen sistema para aprender el funcionamiento de los sistemas operativos, así como aprender y experimentar con la programación en Ensamblador bajo x86-64.
Es un sistema rápido por estar escrito en ensamblador y no tener que traducir las líneas de código para el procesador, además es un sistema pensado en la simplicidad, con funciones sencillas con una buena documentación para que el programador enseguida pueda entender su funcionamiento.
Al ser un sistema sencillo es monotarea, es decir, solo trabaja una tarea por núcleo, el resto de tareas que necesiten ejecución son añadidas a una cola de tareas y estas serán ejecutadas por cualquier núcleo libre de los procesadores que tenga la máquina. Baremetal además es open source, bajo licencia BSD.
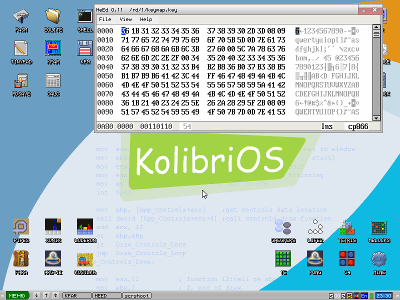
Kollibri OS
También conocido como KOS, es un sistema operativo libre con kernel monolítico bajo arquitectura x86 de 32 bits, que sorprende por su bajo tamaño; al descargar la imagen vemos que tan solo es de 758.9 KiB y una vez descomprimido llega a 1.4 Mb, suficiente para que quepa en un disquet.
Cuenta con una sencilla pero completísima interfaz gráfica que soporta una resolución máxima VESA de 1280x1024 y 16 millones de colores desde la que podemos hacer muchísimas cosas, entre ellas navegar por internet y jugar al Quake. Además soporta multi-tarea anticipativa (preemptive multitasking), hilos (streams) y ejecución en paralelo de llamadas de sistema ("system calls").
No está basado en ningún otro sistema, sino que está escrito desde cero en ensamblador, la representación simbólica más afín al lenguaje máquina, una autentica locura, aunque permite lenguajes y compiladores de alto nivel como C, C++, Free Pascal, Forth, entre otros puedan ser usados para el desarrollo de aplicaciones.
Aunque muchas voces dicen erróneamente que está basado en MenuetOS, sino que es una derivación (fork) creado en 2004 cuando los principales desarrolladores del sistema operativo MenuetOS decidieron que parte de este dejara de estar licenciado bajo la GPL. Es por este motivo por el que muchas aplicaciones de MenuetOS funcionan en KolibriOS.
Su punto fuerte es que funciona con 8 Mb de RAM, reconoce sistemas FAT16, FAT32, NTFS y ext3, reproduce gran cantidad de formatos de audio y video, soporta completamente el protocolo TCP/IP, soporte de medios de CD y DVD y algunas características más.
La principal desventaja es que aunque la mayoría de la documentación está en ingles, la comunidad usa el ruso como lenguaje predominante.
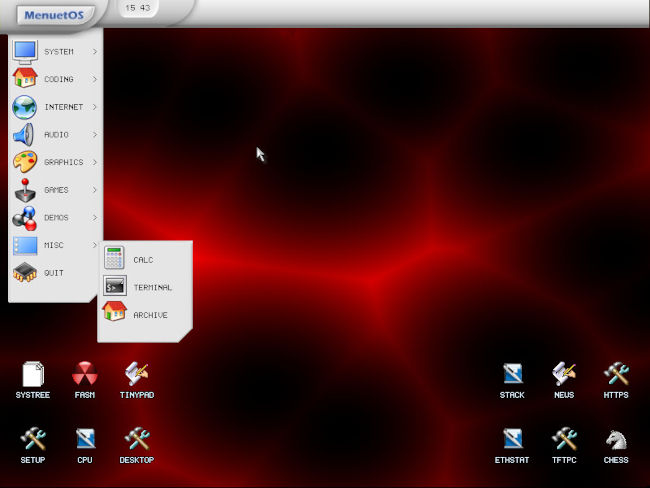
Menuet OS
Conocido también como MeOS, es un sistema de 32 y 64 bits para arquitectura x86 escrito en ensamblador como un hobby y distribuido bajo la licencia GPL, excepto la versión de 64 nits, que es freeeware y viene sin el código fuente.
Es un sistema pequeño pero completo y rápido y, aunque está basado en UNIX, tiene una estructura en ensamblador, por lo que se puede decir que no está basado en ningun sistema operativo particular aunque tenga aires de semejanza.
Su núcleo es de tiempo real, monolítico, con multitarea preferente, el cual incluye controladores de vídeo, redes, audio, dispositivos USB, teclados, sintonizadores de TV, webcams e impresoras, entre otros tipos de dispositivos, y aun así cabe en un disco de 1,44 Mb
La idea era quitar las capas extra entre las diferentes pares de software mediante complicadas técnicas de programación, lo que produce bastantes bugs.
Algunas características son:
- Multitarea preemptiva, multithreading y protección ring-3.
- GUI intuitiva con 16 M de colores y resolución hasta 1280x1024.
- Rapidez de programación que Windows, Linux...
- Ide: editor/compilador para el kernel y aplicaciones en ensamblador.
- Código fuente del kernel y aplicaciones incluidos.
- Soporte TCP/IP con drivers para PPP y Ethernet.
- Servidores http/mp3/email.
- Free-form, aplicaciones y sistema totalmente skinables.
- Alto real-time de datos.
- Cabe en un solo floppy.
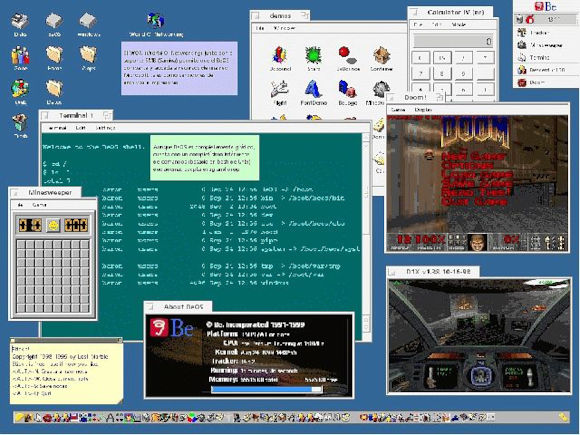
BeOS
BeOS, el sistema que estuvo a punto de ser Mac OS X[1].
La historia empieza en Apple en 1985. Después de que John Sculley consiguiera echar a Steve Jobs de Apple, un ejecutivo de la filial francesa de la compañía, Jean-Louis Gassee, ocupó su lugar. De personalidad arrolladora e ideas incontestables, Gassee era en muchos aspectos un digno sucesor de Jobs. Defendió con la misma firmeza la decisión de no licenciar el Mac OS a otros fabricantes, y mantuvo la marca Apple en el segmento premium contra los intentos de Sculley de penetrar en el mercado económico. Los paralelismos con Jobs no acababan ahí: la relación con Sculley era igual de tormentosa, y finalmente, en 1990, se vio en la misma situación que su predecesor. Al igual que Jobs, a su salida de Apple Gassee creó una nueva compañía, con la intención de hacer bien todo lo que a su juicio Apple estaba haciendo mal. Esa compañía se llamó Be, Inc., y el sistema operativo que desarrollaron se llamó BeOS.
Siendo un sistema operativo que ha sido escrito desde cero, no está atado a ningún esquema o diseño viejo u obsoleto, lo que hizo posible que se lo implementara desde un comienzo haciendo uso de las últimas tecnologías e ideas en lo que a sistemas operativos se refiere.
Está en principio pensado para satisfacer las cada vez más exigentes capacidades multimedia que se requieren de una PC, pero sin embargo por su amigable interface gráfica y gran potencia se presenta como un excelente sistema operativo de propósito general.
El Kernel del BeOS opera bajo el concepto de cliente/servidor. Esto quiere decir que las aplicaciones son los "clientes" que hacen peticiones a los "servidores". Para cada tarea el BeOS tiene un servidor especial. Por ejemplo esta el media_server, que se encarga de todos los aspectos multimedia que las aplicaciones pudieran necesitar, esta el net_server, que se encarga de las comunicaciones a través de redes (por ejemplo Internet), el print_server que se ocupa de todo lo relacionado con impresiones, etc. Pero lo mejor de todo es que los servidores actúan como aplicaciones comunes, siendo posible que uno o mas servidores se cierren como cualquier aplicación, si es oportuno, o cargar algun servidor que haga falta en medio de la ejecución. Esto se traduce que a la hora de configurar el BeOS rara vez es necesario reiniciar para que los cambios tomen efecto, ya que en el peor de los casos el BeOS preguntara si el usuario desea "reiniciar" a un servidor en cuestión. En ese caso dicho servidor se cierra y se vuelve a cargar, en pocos segundos, manteniéndose la integridad del sistema y ahorrándose el usuario el tener que reiniciar.
Por supuesto que el BeOS es capaz de mantener en ejecución mas de una aplicación o proceso sin problemas, El BeOS "explota", se podría decir, el concepto multithreading o proceso en hebras, optimizando al máximo posible el tiempo de ejecución. Esto es así porque los programas en BeOS usan multithreading automáticamente, lo que resulta en una mayor independencia entre aplicaciones y componentes. Si el sistema dispone de más de un procesador, las threads se distribuyen automáticamente.
El BeOS hace fuerte uso de la protección de memoria. En caso de que el BeOS considere que una aplicación ha violado accesos a memoria o alguna otra "norma" de seguridad se la cerrara automáticamente previo aviso al usuario.
BeOS reconoce automáticamente maquinas dotadas con mas de un procesador sin la menor necesidad de configurar nada, y lo que es mas importante hace uso de ellos de manera transparente y eficiente. El BeOS se encarga automáticamente de distribuir las tareas a través de los procesadores presentes por lo que el uso o programación de aplicaciones se hace transparente. En otras palabras, un programador no tiene que diseñar de antemano su aplicación para que contemple este hecho.
Además BeOS opera sobre un sistema de ficheros con journaling que recibe el nombre de BFS (Be File System). BeOS esta pensado con vistas al futuro y su sistema de archivos de 64 bits esta preparado para vérselas con unidades de hasta 18 millones de terabytes, que, haciendo las cuentas, es un poco mas de lo que cualquiera vaya a precisar.
Es un sistema muy rápido que arranca en poco mas de 20 segundos, el cargado de las aplicaciones es instantáneo y el tiempo de cerrado, bajo circunstancias normales es de unos 4 segundos. Las aplicaciones generalmente no ocupan mucho, y se instalan simplemente con descomprimirlas y ejecutarlas. Es BeOS es realmente muy estable y robusto a la hora de mantener corriendo múltiples aplicaciones y procesos. En una prueba hecha, pude tener abiertas 47 ventanas de directorios, 31 ventanas del navegador, escuchar MP3s y aun así podría haber seguido trabajando tranquilamente, ya que el sistema seguía respondiendo como si nada. (AMD K6-II 350Mhz, 64Mb RAM).
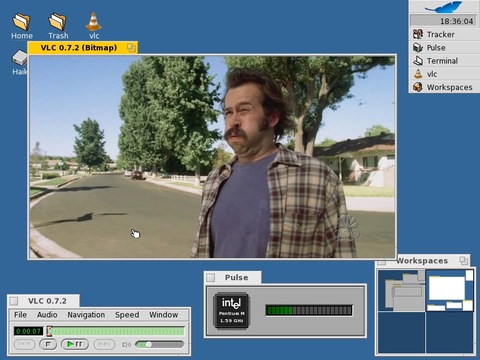
Haiku OS
Es un sistema operativo de código abierto actualmente en desarrollo que se centra específicamente en la informática personal y multimedia. Inspirado por BeOS, Haiku aspira a convertirse en un sistema rápido, eficiente, fácil de usar y fácil de aprender, sin descuidar su potencia para los usuarios de todos los niveles. El proyecto esta dirigido por Haiku, Inc., una organización no lucrativa situada en Nueva York.
En 2001 se inició el proyecto con el nombre de OpenBeOS, cuando la empresa Palm compró a Be. Esto dejaba a los usuarios de BeOS sin soporte a nuevas actualizaciones y nuevo software para sus equipos. En 2004 el proyecto cambió de nombre para evitar los derechos de marca que tenía Palm.
Haiku cuenta con un micronúcleo modular propio, el cual será altamente optimizado para trabajo con audio, vídeo, gráficos, y animaciones en tres dimensiones inspirado en el del original BeOS. Su arquitectura de núcleo avanzada ofrece capacidad para múltiples procesadores, un alto rendimiento, ancho de banda de entrada/salida modular y un penetrante sistema multihilo para su sistema de procesos multitarea reentrante, flexibilidad gráfica y respuesta en tiempo real.
En septiembre de 2009 se libera la primera Alpha de Haiku. Los usuarios que alguna vez usaron BeOS no van a poder evitar sentir una cierta nostalgia, y los recién llegados van a descubrir un nuevo sistema operativo diseñado para aprovechar al máximo el potencial de su hardware sin necesidad de tener conocimientos avanzados.
En Mayo de 2010 se libera la segunda Alpha de Haiku. Ocho meses después de la primera Alpha y en Junio de 2011 se libera la tercera Alpha de Haiku. El 18 de Agosto de 2011, el proyecto cumple 10 años.
Collapse OS
CollapseOS es un sistema operativo escrito en Forth, aunque la primera encarnación de Collapse OS se escribió en el ensamblador Z80. Su único propósito es preservar la capacidad de programar microcontroladores a través del colapso de la civilización. Consta de una colección de herramientas y documentación, y está diseñado para ejecutarse en máquinas mínimas e improvisadas, hechas a piezas, poder editar texto y contenido binario, compilar la fuente del ensamblador para una amplia gama de MCU y CPU.
Collapse OS puede ejecutarse en cualquier plataforma POSIX y se compila fácilmente. Soporta las siguientes características:
- Puede ensamblar binarios Z80, AVR, 8086 y 6809.
- Puede programar microcontroladores AVR.
- Tiene un editor de texto de línea de comandos similar al editor tradicional de Forth, así como un editor de texto visual inspirado en el VI de UNIX.
- Tiene un editor visual binario.
- Tiene todo el poder de un intérprete de Forth razonablemente bien equipado.
- Se sabe que se ejecuta y se aloja automáticamente en máquinas muy reducidas en varias CPU. Consulte la lista de soporte de hardware.
- Extremadamente simple: Aproximadamente 3000 líneas de código "real" (excluye extras, CVM, emuladores, herramientas POSIX, documentos, pero incluye todo lo que una computadora post-colapso necesitaría para cumplir su propósito en todos los arcos compatibles).
- Tiene soporte de almacenamiento masivo. Actualmente en tarjetas SD y disquetes de 5 1/4 "
- Se ejecuta en cualquier entorno POSIX a través de una máquina virtual implementada en C.
- Construido a partir de un entorno POSIX con herramientas mínimas: solo se necesitan cc, make y curses.
Existe un emulador JS Collapse OS de Michael Schierl que permite ejecutar Collapse OS desde el navegador.
DuskOS
Dusk OS es un sistema de 32 bits y hermano mayor de CollapseOS. Su propósito principal es ser de máxima utilidad durante la primera etapa del colapso de la civilización, es decir, cuando ya no podamos producir ordenadores modernos pero que todavía queden muchos ordenadores antiguos por ahí.
Lo hace priorizando agresivamente la simplicidad a costa de restricciones poco ortodoxas, al tiempo que pretende contentar a los usuarios avanzados.
Dusk OS innova al disponer de un compilador "casi C" que le permite aprovechar el código C de UNIX[1], mediante un modesto esfuerzo de portabilidad, para alcanzar sus objetivos y mantenerse fiel a sus limitaciones de diseño con un esfuerzo mínimo.
Arranca desde un núcleo muy pequeño (1000 líneas de ensamblaje i386). A partir de este pequeño núcleo, en el arranque, se abre camino hasta un sistema que tiene un compilador de C funcional, que luego le permite arrancar un poco más. A partir de ahí, se inicia en DuskCC, que tiene aproximadamente 2000 líneas de código Forth (incluido el backend y el ensamblador específicos de arquitectura).
Con respecto al "arranque de origen", es incluso más extremo que Collapse OS porque las máquinas modernas permiten que este proceso se ejecute rápidamente y todo el proceso es aún más rápido que un arranque normal de GNU/Linux[2]. En las máquinas de destino de Collapse OS, este proceso sería prohibitivo, por lo que una parte más grande del sistema operativo se compila de forma cruzada en el kernel, lo que permite eludir todos los problemas de compatibilidad binaria y reubicación y solo lidiar con la compatibilidad de fuentes. Entonces, sin ELF, sin binutils, solo código diseñado para ejecutarse desde donde se generó en primer lugar.
Todos los sistemas operativos modernos de código abierto pueden modificarse para adaptarse a las necesidades de sus usuarios, pero su complejidad limita la probabilidad de que el usuario pueda hacerlo. Un sistema operativo más simple aumenta esta probabilidad. Las características principales son:
- Tiene una VM escrita en C, construible desde un entorno POSIX, lo que permite que Dusk se construya para cualquiera de sus objetivos compatibles.
- Tiene un compilador "casi C" que aún necesita algo de trabajo, pero ya es capaz de compilar un buen subconjunto de C.
- Puede ejecutarse sin sistema operativo en algunas PC (y QEMU, por supuesto). Tiene controladores (en varios estados de sofisticación) para:
- VGA en modo texto
- Teclado PS/2
- Controladores PCI
- Controladores ATA
- Controladores AHCI
- Controladores de disquete
- Puertos COM de PC
- VESA en modo gráfico
- Compatibilidad con ratón PS/2
- Puede leer, escribir y arrancar desde volúmenes FAT12/FAT16 (no FAT32 por ahora).
- Puede crear nuevos volúmenes FAT12.
- Huella muy pequeña. En modo Grid (modo TUI) con el editor de texto Grid y DuskCC (incluyendo su stdlib) cargados, Dusk usa 180 KB de RAM en una PC.
- Se aloja completamente en todas sus máquinas de destino (solo PC por ahora).
- Sencillo y conciso. El sistema central (todos los núcleos, controladores, sistemas de archivos, CC, bibliotecas centrales) tiene menos de 8000 líneas de código.
- Desde que text/edalcanzó un estado utilizable, el autor principal de Dusk lo ha estado desarrollando desde sí mismo en un viejo Pentium 75 Mhz con 16 mb de RAM y lo está pasando genial.
Lista de bases de código portadas:
- El CVM de Collapse OS
- La máquina virtual uxn
- El puff()algoritmo de zlib
- El editor de texto izquierdo . (Todavía un poco glitchy...)
Lista de aplicaciones de cosecha propia:
- Compilador C (ver doc/cc)
- Editor de texto (ver doc/text/ed)
DexOS
DexOS es un sistema operativo similar a una consola x86 de 32 bits, codificado en 100% en ensamblador por Craig Bamford.
Como la optimización de la velocidad es crucial, no hay paginación de memoria virtual y solo se permite un único proceso, aunque ese proceso puede generar múltiples subprocesos. El programa se ejecuta en ring0, por lo que tiene acceso directo a todo el hardware (incluida la CPU y los gráficos). La asignación de memoria es responsabilidad de la aplicación; no hay asignación de memoria de front-end. Todo el sistema operativo cabe en menos de 64 KB de memoria.
Puede arrancar desde un disquete, CD, unidad flash USB o directamente desde el disco duro. Tiene muchas funciones y bibliotecas integradas para ayudar a los programadores. Hay un IDE, un puerto Fasm y una pila TCP/IP completa implementada, además de una consola como GUI.
Al ser modular, se puede acceder fácilmente a la funcionalidad de todas las 'partes' del sistema desde sus aplicaciones y, si pierde una parte, es muy fácil agregarla más tarde, todo puede ser conectado, y todo es reemplazable.

EcOS
Es un sistema operativo de tipo embebido que funciona en dispositivos de varias arquitecturas, entre ellas la x86, PowerPC, MIPS o ARM.
Detrás de su desarrollo se encuentra una potente empresa dedicada al mundo de GNU/Linux[1] como es Red Hat Software. Como el sistema operativo del pingüino, eCos es libre y gratuito, y puede ser descargado junto a toda la documentación pertinente desde la web.
EraMS
Otro sistema desconocido, de nombre EraMS, un sistema operativo Libre escrito en turbo Pascal y que cabe en un disquet. No necesita de disco duro para funcionar ya que crea el sistema de ficheros tipo UNIX[1] en la RAM del equipo (16 Mb bastan). Cuando el equipo se apaga se guardan los cambios en un disquet arrancable. Requiere MS-DOS para funcinar.
Está diseñado para funcionar en una arquitectura x86 y es la continuidad de un proyecto muy beta llamado MPS. ERaMS reconoce sistemas de archivos como los de GNU/Linux[2] y los monta como módulos. Las aplicaciones se cargan también como módulos, por lo que un reproductor mp3 se montaría como si se tratase de un dispositivo en /mount/mp3/ y cualquier archivo que se copie aquí se añade directamente a la lista del reproductor.
Un sistema raro pero efectivo para principiantes sin ganas de complicarse con comandos raros y sobre todo con máquinas poco potentes.
Geek OS
Es un modesto sistema operativo para arquitecturas x86. Su propósito es servir como ejemplo de un kernel corriendo en hardware "real", (real porque muchos de los sistemas actuales se basan en emuladores Bochs).
Actualmente su desarrollo está muy avanzado, aunque no se le ha encontrado una utilidad común, ya que mas bien es el trabajo de un grupo de desarrolladores a los que les gusta el trasteo y la experimentación.
Harvey OS
Harvey es un esfuerzo para proporcionar un sistema operativo moderno, distribuido, de 64 bits. Un entorno diferente para investigar y encontrar nuevas líneas de trabajo. Puede ser construido con gcc y clang y tiene un subsistema compatible con ANSI/POSIX.
Por ahora funciona en máquinas x86_64 (amd64), RISC-V y próximamente en ARMv8 (AArch64/A64). Harvey es de código abierto y se distribuye bajo GPL, además de pertenecer a la Software Freedom Conservancy.
Mike OS
Desarrollado por Mike Saunders, es un sistema operativo open source con licencia BSD para arquitectura x86 escrito en ensamblador y enfocado al aprendizaje de sistemas operativos y como iniciación al lenguaje ensamblador.
Al igual que Baremetal, tiene una gran documentación de fácil comprensión, así como numerosos comentarios en las lineas de código.
Carece de interfaz gráfica por lo que la consola de comandos es lo utilizado para hacerlo funcionar, aunque dispone de un pequeño menú gráfico por consola para el lanzamiento de aplicaciones.
Puede arrancar desde un disquet, un CD-rom o un stick USB y existen aplicaciones de visión de imágenes, editor de textos, gestor de archivos, juegos y audio a través del pc speaker.
PetrOS
Es un nuevo sistema operativo de 32-bit para plataforma x86 desarrollado por Trumpet Software International Pty Ltd. en Hobart, Tasmania.
Ha sido creado desde los primeros principios de un sistema operativo, permitiendo ponerlo en pequeños equipos y de manera modular. Es un sistema que intenta una carga rápida del sistema y un rendimiento óptimo y sobre todo fácil de usar.
Ofrece al usuario un gran control sobre los procesos y destinado tanto para un uso de escritorio como para montar un servidor sin necesidad de añadir ninguna "suite" en particular.
Ha sido creado en el lenguaje de alto nivel "Object Pascal" y basado en el principio "KISS" (Keep It Small and Simple: Mantenlo pequeño y simple). Sus características principales son:
- Micro kernel de unos 190K, que permite más memoria para las aplicaciones.
- Un completo socket TCP de unos 300 K.
- Funciona a partir de un procesador 486.
- Mínimo de memoria par funcionar de 2 MB.
- Periféricos estandard en micro kernel.
- Multitarea.
- Sistemas de carga de módulos.
- Posibilidad de memoria virtual.
- Compatibilidad con discos estandard y soporte para múltiples formatos ejecutables.
El sistema en sí es una GUI (interfaz gráfica) para los comandos creados, teniendo que mejorar dicha GUI para poder acceder a las nuevas actualizaciones del sistema. Además permite la coexistencia con otros sistemas operativos.
El coste de este sistema es de unos 50 dólares
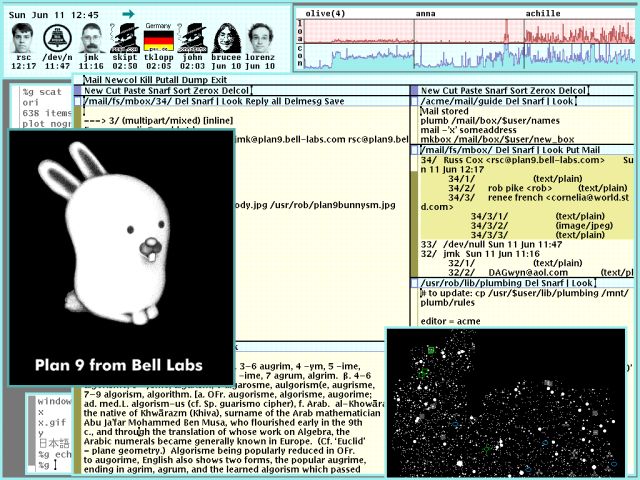
Plan9
Plan 9 es un interesante proyecto surgido de los laboratorios Bell Labs en 1992, totalmente funcional, aunque no fue hasta 1995 que estuvo disponible para el público. Implementa la idea de un sistema operativo distribuido puro, creación de Ken Thompson, el padre del sistema operativo UNIX[1].
Aunque inicialmente se hizo para arquitectura IA-32, ha sido portado a MIPS, DEC Alpha, SPARC, PowerPC, ARM, Motorola 68000 y otras arquitecturas. El sistema está escrito en un dialecto del lenguaje de programación C.
Puede descargarse de forma libre y gratuita desde Internet para instalarlo, e incluso como imagen para el emulador de máquina virtual hardware VMWare, con lo que no tendremos que reparticionar el disco duro para usarlo.
Su entorno gráfico es totalmente espartano representado a través del sistema de archivos en lugar de sistemas especializados, pero su utilidad es altísima, especialmente en proyectos en los que se tenga que trabajar con máquinas muy dispares y distantes entre sí.
Contiene un sistema de programación dialecto de C, una shell simplificada y un emulador POSIX que admite código UNIX, pudiendo importar aplicaciones POSIX y emular el sistema de sockets Berkeley.
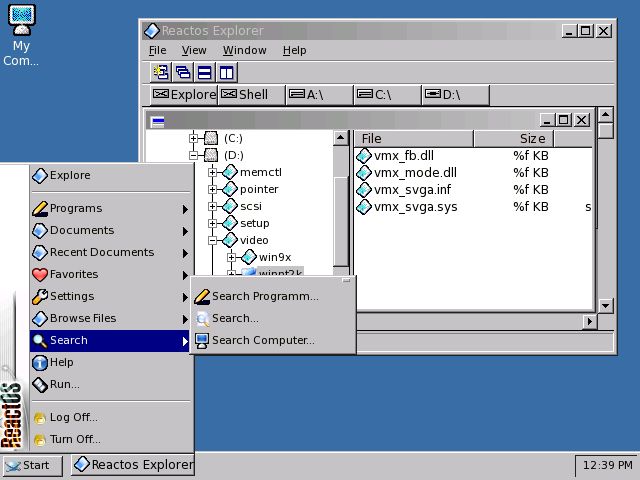
ReactOS
Sobre el año 1996 muchos programadores crearon un grupo llamado FreeWin95 con el objetivo de crear un sistema operativo "clonado" de Windows 95[1].
Desafortunadamente se cayó en un pozo sin fondo sobre la apariencia final y características sin llegar a obtener resultados.
A finales del 1997, el proyecto salió sin apenas nada que ofrecer. Jason Filby, el coordinador del proyecto creó una lista de correo para conseguir gente y reavivar el proyecto diciendo que el "clon" se basaría en Windows NT. En Febrero de 1998 el proyecto ReactOS empezó.
El kernel costó mucho trabajo pero se consiguió que fuera lo suficientemente estable y muchas de las APIs han sido portadas y muchas librerías transformadas. El código de red ha sido programado pero no funciona por el momento. Se ha creado también una interfaz gráfica y gracias al proyecto Wine se consigue avanzar a pasos cada mayores.
ReactOS está principalmente escrito en C, con algunos elementos, como el Explorador de archivos de ReactOS Explorer, escritos en C++. El proyecto implementa parcialmente la funcionalidad de la API de Windows y se ha trasladado a la arquitectura del procesador AMD64. ReactOS, como parte del ecosistema FOSS, re-utiliza y colabora con otros muchos proyectos de software libre, más notablemente el proyecto Wine el cual desarrolla una capa de compatibilidad de Windows para sistemas operativos basados en UNIX.
ReactOS tiene como meta lograr compatibilidad binaria con aplicaciones y drivers de dispositivo para sistemas NT y XP, usando una arquitectura similar y proveyendo un interface publico completo y equivalente.
Redox
Es un sistema operativo tipo UNIX[1] escrito en Rust, cuyo objetivo es llevar las innovaciones de Rust a un micronucleo moderno y a un conjunto completo de aplicaciones. Fue creado por Jeremy Soller y se publicó por primera vez el 20 de abril de 2015 en GitHub y actualmente tiene más de 40 desarrolladores.
Licenciado bajo MIT, incluye una interfaz gráfica de usuario opcional llamada Orbital, los controladores se ejecutan en el espacio de usuario, incluye comandos comunes de Unix y una librería personalizada escrita en Rust (relibc). Tiene un fuerte enfoque en la seguridad, la estabilidad y el alto rendimiento.
Trabaja sobre un sistema de archivos TFS inspirado en el sistema de archivos ZFS, Ion shell y pkgutils, el gestor de paquetes.
Rugged
Rugged OS es un sistema operativo de misión critica. Estos sistemas se espera que nunca falle porque si algo los paralizara, aunque fuera durante un breve espacio de tiempo, no solo podría haber grandes pérdidas materiales, también se pondría en peligro la vida de mucha personas y la seguridad de la población.
Hablamos de los servicios de emergencia, de las urgencias hospitalarias, de los sistemas de trading en los que se basan las operaciones en Bolsa, de las redes de cajeros automáticos, de la defensa nacional, control aéreo, etc.
Este sistema pertenecía a la compañía canadiense Ruggedcom, que posteriormente fue absorbida por Samsung.
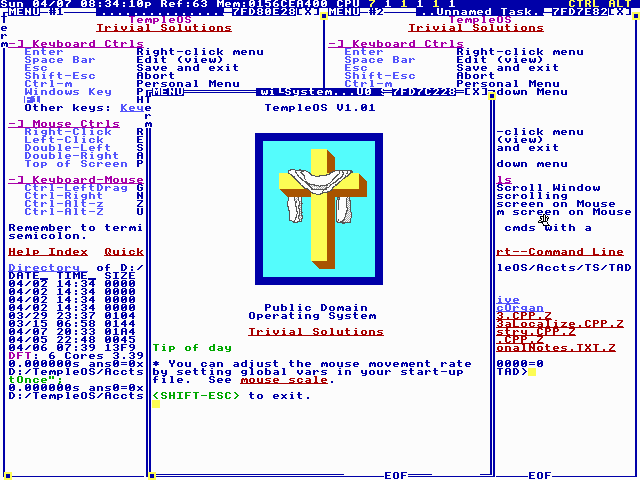
Temple OS
Anteriormente llamado J Operating System, SparrowOS y LoseThos, en 2013 se lanzó Temple OS, un sistema operativo diseñado para ser el Tercer Templo profetizado en la Biblia, programado de cero por Terry A. Davis (con un lenguaje creado por él, HolyC), que murió en 2018 y cuyo legado mantiene un interés notable por su concepción.
Tras una década, después de una serie de episodios que luego describió como una revelación de Dios, se lanzó su primera versión, que traía un simulador de vuelo, compilador y kernel originales.
El sistema se caracterizó como un Commodore64 x86-64 moderno, utilizando una interfaz similar a una mezcla de DOS[1] y Turbo C.
El trasfondo "bíblico" de este sistema operativo ligero es realmente curioso, pero se trata de una alternativa realmente curiosa en su interfaz (640x480 píxeles, no pasa de ahí), su soporte de 16 colores y su soporte extensivo de hipervínculos en un sistema de 64 bits, multitarea cooperativa, multinúcleo, de dominio público, de código abierto, sin espacio de usuario, espacio de direcciones único, y sin conexión a red.
Cuenta de forma nativa con un simulador de vuelo (limitado, por supuesto), un compilador y un kernel, además de un juego igualmente curioso llamado "After Egypt".
En 2017 se lanzó su última actualización.
TriangleOS
Es un sistema operativo de 32 bits para arquitectura x86 escrito desde cero en C/ASM.
Es un sistema pequeño, amigable y estable y combina funciones de escritorio con las propias de un servidor, por lo que soporta mp3, explorador de internet y soporte para ruter.
La interfaz gráfica recuerda un poco a BeOS, aunque su creador insiste en que no es ningún clon. Lleva librerías C y socket para el desarrollo de aplicaciones y se está planeando hacer un SDK.

Sky OS
Es un sistema operativo Libre escrito "from scratch" (desde cero) para arquitecturas x86 PC's el 15 de diciembre del año 1997 y es mayormente el esfuerzo de un solo hombre, Robert Szeleney.
Es un sistema moderno que soporta características como multiprocesador (SMP), memoria virtual, protección de memoria, mltitarea, threading, etc. Adicionalmente lleva una interfaz gráfica llamada SkyGI.
El hecho de que no sea portable para otras plataformas y su desarrollo se centre solo en x86 hace que este sistema esté muy optimizado. No requiere demasiada máquina para poder instalarlo (pentium con 32 Mb de RAM y soporte VESA).
Es un sistema pensado para Pc de escritorio, por lo que al arrancar estamos ante un modo gráfico y cosas como la línea de comandos y la programación de scripts son opcionales (están, pero su uso no es imprescindible).
Algunas características son:
- Modo 32Bit protegido.
- Multitarea preemptiva y multithreading.
- Memoria virtual.
- Multiprocesador. Soporta hasta 16 procesadores.
- Soporte de modo Virtual86 (para llamadas a BIOS de 8 y 16 bits).
- Sistema de ficheros virtual.
- Soporte del sistema de archivos FAT (con soporte LFN ) y FIFO.
- Sistema de montaje de isos (por ejemplo imagenes ISO y BIN).
- Soporte de varios formatos binarios: PE, COFF, A.OUT y ELF.
- Soporte para carga dinámica de módulos en el kernel.
- Sistema de reloj Real Time , PIC(8259) y APIC.
- Soporte USB.
- Registro global del sistema.
- Múltiples escritorios virtuales con sus propias configuraciones.
- Muchas características del estándar POSIX, po lo que muchos programas GNU funcionan en SkyOS.
- Compilador y binutils de GNU.
- Soporte de protocolos de red Ethernet, ARP, TCP/IP, ICMP, UDP, y Barkley Socket library.
VisOSpsys
VISual OPerating SYStem es un sistema operativo escrito “desde cero” en 1997 y desarrollado en C y pequeñas porciones en lenguaje ensamblador x86, principalmente por un solo programador aficionado, Andy McLaughlin, originario de Calgary, Canadá.
Su licencia es GPL y está orientado a un grupo muy reducido, sobre todo estudiantes de informática.
La mayor parte de Visopsys es un kernel de estilo masivamente monolítico, de 32 bits, memoria virtual y multitarea. A esto se agrega una biblioteca C básica y un conjunto minimalista de aplicaciones, que en conjunto comprenden un sistema operativo pequeño pero razonablemente funcional que puede operar de forma nativa en modo gráfico o de texto.
Desde la perspectiva de un usuario, el "pero, ¿para qué diablos es bueno?" se explica porque su principal punto de venta es un programa de administración de particiones razonablemente funcional en la línea de Partition Magic de Symantec.
Visopsys y su Administrador de discos comprenden el popular sistema Partition Logic que puede crear, formatear, eliminar, redimensionar, desfragmentar, copiar y mover particiones y modificar sus atributos. Admite tablas de particiones MBR y UEFI. También puede copiar discos duros y tiene una interfaz gráfica sencilla y amigable. Una versión básica puede caber en un disquete de arranque, o puede usar todo el sistema desde un CD / DVD "en vivo".
Algunas características son:
- Tiene un entorno gráfico nativo integrado en el kernel, aunque también tienen sólidas capacidades de línea de comandos.
- Ofrece multitarea preventiva.
- Memoria virtual y protección de la memoria.
- Redes TCP-UDP, DHCP, ICMP y un cliente DNS.
- E/S de disco asíncrono almacenado en búfer.
- Protección de E/S.
- Soporte de ejecutables ELF.
- Sistemas de archivos FAT (12,16 y 32 bits), EXT2/3/4 de solo lectura, sistemas CD-ROM (ISO9660/Joliet) y DVD-ROM (UDF).
- Pipes y memoria compartida para comunicaciones entre procesos (IPC).
- Shell nativo.
- Bibliotecas C.
- Programa de instalación nativo.
- Vinculación dinámica.
El soporte de hardware se limita a dispositivos que cumplen con los estándares de interfaz de hardware populares, como VESA, PCI, PS2, USB, ATA/ATAPI (IDE), SATA, además de todos los demás componentes de chipset de PC estándar. Los gráficos se proporcionan a través de la interfaz de búfer de fotogramas lineal VESA (sin rendimiento, pero razonablemente estándar). Los requisitos de memoria son pequeños: aproximadamente 5 MB en modo texto y, en general, menos de 20 MB en modo gráfico, según la resolución de la pantalla, etc.

VMS
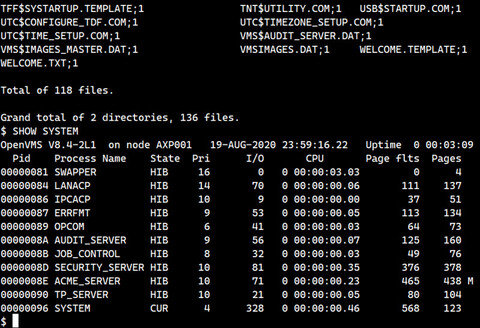
Virtual Memory System es propiedad de DEC (Digital Equipment Corporation) concebido originalmente para sus miniordenadores VAX. Salió en Agosto de 1978 y fue renombrado a "OpenVMS" en su versión 5.5 en 1990, creado por Dave Cutler, que fue contratado en 1988 para la creación de Windows NT[1].
La primera versión de VMS de DEC que salió para la plataforma Alpha se llamó AXP V1.0, creándose así un lio de versiones: OpenVMS para VAX (VMS/VAX) o OpenVMS para Alpha (VMS/AXP). El resto de versiones fueron certificadas por el consorcio X/Open para soporte standard POSIX.
VMS es uno de los sistemas más seguros del mercado. Es multiusuario y multitarea y tiene el mejor puesto a nivel de clustering en número (96 nodos en un único cluster) y distancia y es muy escalable desde Workstations de escritorio hasta los poderosos Mainframes.
Tiene una arquitectura en capas, que consiste en un Ejecutivo privilegiado, un Intérprete CLI que se ejecuta en un nivel intermedio de privilegio, y utilidades y bibliotecas al tiempo de ejecución que se ejecutan en un modo no privilegiado. El código no privilegiado normalmente invoca la funcionalidad del Ejecutivo a través de los servicios del sistema (equivalente a las llamadas al sistema en otros sistemas operativos).
Las capas y mecanismos están construidos alrededor de ciertas características de la arquitectura VAX, incluyendo:
- La disponibilidad de cuatro modos de acceso al procesador (denominados Kernel, Ejecutivo, Supervisor y Usuario, en orden de privilegio decreciente). Cada modo tiene su propia pila, y cada página de memoria puede tener protecciones de memoria especificadas por modo.
- Un espacio de direcciones virtual que se divide en secciones de espacio privado de proceso y secciones de espacio de sistema que son comunes a todos los procesos.
- 32 niveles de prioridad de interrupción que se utilizan para la sincronización.
- Soporte de hardware para entregar trampas de sistema asíncronas a los procesos.
Estos mecanismos de la arquitectura VAX se implementan en Alpha, Itanium y x86-64 mediante el mapeo de los mecanismos de hardware correspondientes en esas arquitecturas, o a través de la emulación (a través de PALcode en Alpha, o en software en Itanium y x86-64).
Desde 2014, OpenVMS continua su desarrollo y soporte mediante una empresa denominada VMS Software Inc. (VSI)
Aegis
Se lanzó originalmente en marzo de 1981 como AEGIS y se le cambió el nombre a Domain/OS en 1988 cuando se agregaron entornos UNIX[] al sistema operativo.
AEGIS se distingue principalmente por estar diseñado para la computadora en red, a diferencia de sus competidores, que son esencialmente sistemas independientes con funciones de red adicionales. Los principales ejemplos de esto son el sistema de archivos, que está completamente integrado en todas las máquinas, a diferencia de UNIX que establece una distinción entre los sistemas de archivos en el sistema host y en otros, y el sistema de administración de usuarios, que se basa fundamentalmente en la red. Esta orientación es tan básica que incluso una máquina Apollo independiente no se puede configurar sin una tarjeta de red.
La actualización de los usuarios de AEGIS SR9 a Domain/OS SR10 se vio ralentizada por el hecho de que muchos usuarios no vieron ningún requisito, por mayores requisitos de espacio en disco, por herramientas de administración nuevas y más complejas, por el rendimiento más bajo de SR10 y por la naturaleza defectuosa de SR10.0, aunque las versiones posteriores son más fiables. Sin embargo, las máquinas HP/Apollo posteriores (las estaciones de trabajo de las series DN10000, DN2500 y 4xx) solo pueden ejecutar SR10.
En cuanto a interfaz, es similar a otras estaciones de trabajo de la época, ya que utiliza una pantalla de gráficos de alta resolución y un mouse para proporcionar una GUI denominada DM (Display Manager). DM está integrado con el propio administrador de ventanas del sistema operativo conocido como WMGR (window manager).
El DM contiene dos funciones integradas, un editor de texto y una transcripción, que es una especie de terminal virtual. Los programas de usuario pueden agregar funciones adicionales. Una de las características únicas del DM es la "edición universal". Todo el texto en cualquiera de las ventanas integradas se puede editar utilizando el mismo idioma de edición. Esto incluye el historial que se muestra en una ventana de transcripción, aunque ese texto es de solo lectura. Además, la historia es ilimitada. Comienza desde el nacimiento del proceso al que está vinculado, y el historial anterior nunca se elimina. Cada transcripción se adjunta a una mini ventana de entrada donde la entrada del proceso se puede editar usando el mismo lenguaje de edición que se usa en otros lugares.
La interfaz de comandos de AEGIS es similar a UNIX, ya que tiene un intérprete de línea de comandos que comprende canalizaciones, redirección, secuencias de comandos, etc, e invoca otros comandos como programas separados, pero los comandos reales están diseñados para ser más fáciles de recordar y usar que sus equivalentes de UNIX, y se espera que los comodines se amplíen mediante comandos individuales en lugar del propio intérprete de línea de comandos.
El usuario puede incrustar variables de entorno en enlaces simbólicos, que, por ejemplo, permite cambiar entre diferentes versiones de UNIX configurando la variable de entorno SYSTYPE en consecuencia; los enlaces simbólicos luego apuntan a las versiones apropiadas de los archivos.
KATAOS
Google ha anunciado en octubre de 2022 KataOS, un sistema operativo centrado en la seguridad y los sistemas embebidos que está construido casi enteramente con Rust. No emplea GNU/Linux[1] ni Fuchsia, sino el micronúcleo seL4, el cual, según el gigante del buscador, "pone la seguridad al frente y en el centro".
Según Google y la empresa Antmicro, creadora de seL4, es imposible de hackear, gracias a que implementa funciones de seguridad extrema, como detectar cualquier mínima alteración, evita que se puedan alterar códigos sin un permiso o que se pueda leer la memoria y datos sin un permiso.
El microkernel no proporciona abstracciones de alto nivel listas para usar para administrar archivos, procesos, conexiones de red y similares, sino que solo proporciona mecanismos mínimos para controlar el acceso al espacio de direcciones físicas, las interrupciones y los recursos del procesador. Las abstracciones de alto nivel y los controladores para interactuar con el hardware se implementan por separado en la parte superior del microkernel en forma de tareas a nivel de usuario. El acceso de tales tareas a los recursos disponibles para el microkernel se organiza a través de la definición de reglas.
El cargador de aplicaciones en el entorno seL4, los servicios del sistema, un marco de desarrollo de aplicaciones, una API para acceder a las llamadas del sistema, un administrador de procesos, un mecanismo de asignación de memoria dinámica, etc. están escritos en Rust. Para el montaje verificado se utiliza el toolkit CAmkES desarrollado por el proyecto seL4. Los componentes para CAmkES también se pueden crear en Rust.
KataOS está pensado para su uso en el creciente número de dispositivos inteligentes, con especial énfasis en el hardware integrado que ejecuta aplicaciones de aprendizaje automático.
Para que el resto del sistema sea seguro en su totalidad se está programando una implementación llamada Sparrow, que combina KataOS con una plataforma de hardware segura, que incluye una raíz de confianza lógicamente segura construida con OpenTitan en una arquitectura RISC-V. Sin embargo, para el lanzamiento inicial, saldrá solo para ARM de 64 bits más estándar que se ejecuta en simulación con QEMU.
El código de Sparrow, incluyendo todos los diseños de hardware y software, han sido abiertos.
Oberon
Es un sistema operativo modular, monousuario, monoproceso y multitarea escrito en el lenguaje de programación del mismo nombre, Oberon, desarrollado originalmente a finales de la década de 1980 en ETH Zurich por Niklaus Wirth y Jürg Gutknecht. Se desarrolló originalmente como parte del proyecto de la estación de trabajo Ceres basada en NS32032.
Tiene una interfaz de usuario de texto (TUI) poco convencional en lugar de una interfaz de línea de comandos (CLI) convencional o una interfaz gráfica de usuario (GUI). Combina la comodidad de apuntar y hacer clic de una interfaz gráfica de usuario (GUI) con la fuerza lingüística de una interfaz de línea de comandos (CLI) y está estrechamente ligada a las convenciones de nomenclatura del lenguaje Oberon. El texto que aparece en casi cualquier lugar de la pantalla puede editarse y utilizarse como entrada de comandos. Los comandos se activan pulsando con el botón central del ratón sobre un fragmento de texto de la forma Módulo.Comando (opcionalmente seguido de parámetros, que terminan en ~). Aunque es muy diferente de una línea de comandos, la TUI es muy eficiente y potente, pero algo difícil al principio, por lo que se recomienda estudiar el Tutorial de Oberon System 3 de André Fischers.
Fue portado a las plataformas Ceres, Intel IA-32, ARM, MIPS y RISC-V. El sistema también evolucionó en el multiproceso, multiprocesamiento simétrico (SMP) capaz A2 (anteriormente Active Object System (AOS), luego Bluebottle), con una interfaz de usuario de zoom (ZUI).
Las versiones lanzadas fueron las siguientes:
- V1 fue la primera versión utilizable.
- V2 es una V1 con un cambio importante en el modelo de texto junto con el editor llamado Write
Hubo una bifurcación importante a principios de los 90: V4 vs. Sistema 3
El grupo de Jürg Gutknecht introdujo objetos persistentes y bibliotecas de objetos, ampliando así el núcleo. El grupo de Hanspeter Mössenböck consiguió características similares introduciendo elementos activos asignados a un carácter especial, ampliando así las fuentes sin cambiar el núcleo. El Sistema 3 a veces también se llamaba Spirit of Oberon y más tarde ETH Oberon, mientras que el V4 a veces también se llamaba Linz Oberon.
- V5 llegó en 2013 cuando Niklaus Wirth adaptó el sistema básico a un diseño FPGA actual. Todo el sistema se compila en menos de 10 segundos en una placa Spartan-3. Pese a llamarse V5 es mucho más similar funcionalmente a la V1 original que se ejecuta en el Ceres que cualquiera de las versiones posteriores.
- V4 se acerca más al sistema operativo original desarrollado por Wirth y Gutknecht. Oberon V4 parece estar huérfano, casi no hay cambios desde el año 2000.
- Plugin Oberon y binarios slim fue una versión de Oberon System 3 más integrada en el SO Microsoft Windows que otras implementaciones, con soporte para OLE, Netscape Plugins y el formato binario denominado Oberon Module Interchange (OMI) o binarios slim, que permitía código objeto portable entre arquitecturas Intel x86, Motorola 68K y PowerPC.
- AOS/Bluebottle/A2 llegó sobre el 2010 cuando el departamento de ciencias de la computación de la ETH Zurich comenzó a explorar objetos activos y concurrencia para sistemas operativos, y publicó una versión temprana de un nuevo lenguaje Active Oberon y un nuevo sistema operativo para él, primero llamado Active Object System (AOS) en 2002, luego debido a problemas de marca, renombrado Bluebottle en 2005, luego renombrado A2 en 2008.
- StailaOS fue parte de un proyecto de investigación industrial el Native Systems Group de la ETH Zurich específico para aplicaciones, basado en la última versión Oberon OS. Está pensado para usos como análisis en tiempo real, aplicaciones financieras, planificación de recursos empresariales (ERP) basada en memoria principal...
- PC-Native Oberon corre en hardware bare PC IA-32 (x86-32). Nunca ha existido un Oberon Nativo V4. Los requerimientos de hardware son: 133 MHz Pentium, 100MB de disco duro, tarjeta grafica VESA 2 con resolucion minima de 1024x768 pixeles, tarjeta de red 3Com opcional.
- LNO es la versión Linux Native Oberon que utiliza Linux como capa de abstracción de hardware (HAL). Su objetivo es ser lo más compatible posible con PC-Native Oberon. En 2015, Peter Matthias revitalizó LNO bajo el nombre Oberon Linux Revival (OLR) como una distribución multiplataforma que se ejecuta sin problemas en Intel x86, ARM, MIPS y RISC-V.
- Proyecto Oberon 2013. Wirth y Paul Reed completaron una reimplementación del sistema Oberon original para la Digilent Xilinx Spartan 3 FPGA Starter Board. En 2015, Reed colaboró con Victor Yurkovsky para crear OberonStation, un ordenador basado en Xilinx Spartan 3 diseñado específicamente para ejecutar Oberon. Desde entonces, el sistema se ha portado a una placa de desarrollo Xilinx Spartan 6 FPGA de Saanlima Electronics, y a una placa Trainer FPGA Digilent Nexys A7-100 basada en Xilinx Artix 7 de CFB Software. Peter de Wachter implementó un emulador para ello, que también fue portado a Java y JavaScript por Michael Schierl, ejecutándose en navegadores modernos, y portado a Free Pascal/Ultibo por Markus Greim y a Go.
RSTS
Es un sistema operativo multiusuario de tiempo compartido desarrollado por Evans Griffiths y Hart of Boston, adquirido por Digital Equipment Corporation (DEC, ahora parte de Hewlett Packard) para la serie PDP-11 de minicomputadoras de 16 bits.
La primera versión de RSTS (RSTS-11, Versión 1) fue implementada en 1970 por los ingenieros de software de DEC que desarrollaron el sistema operativo de tiempo compartido TSS-8 para el PDP-8. La última versión de RSTS (RSTS/E, versión 10.1) se lanzó en septiembre de 1992. RSTS-11 y RSTS/E generalmente se denominan simplemente "RSTS".
El kernel de RSTS fue programado en el lenguaje ensamblador MACRO-11, compilado e instalado en un disco usando el programa CILUS, ejecutándose en un sistema operativo DOS-11. RSTS arrancó en una versión extendida del lenguaje de programación BASIC que DEC llamó BASIC-PLUS.
RSTS utiliza una conexión de comunicación en serie RS-232 para interactuar con el operador. Se pueden conectar hasta 128 terminales.
Se introdujo la administración de memoria en las computadoras PDP-11 lo que allanó el camino para que los desarrolladores separaran los procesos del modo de usuario desde el núcleo del núcleo.
Una de las características de RSTS es el medio para la ejecución de programas. Estos entornos estaban separados entre sí, de modo que uno podía iniciar un programa desde un entorno y el sistema cambiaba a un entorno diferente mientras ejecutaba un programa diferente, y luego devolvía al usuario al entorno original con el que comenzó
En 1994, DEC vendió la mayor parte de su negocio de software PDP-11 a Mentec, pero Digital continuó apoyando a sus propios clientes de PDP-11 durante un breve período con la ayuda del personal de Mentec.
En 1997, Digital y Mentec otorgaron una licencia sin costo a cualquier persona que deseara usar RSTS 9.6 o anterior con fines no comerciales o de pasatiempo. La licencia solo es válida en el emulador SIMH PDP-11. La licencia también cubre algunos otros sistemas operativos digitales. Se incluyen copias de la licencia en el kit de software autorizado disponible para descargar en el sitio web oficial del emulador SIMH

Nexenta
Estamos ante un sistema operativo basado en GNU/Linux[1] y OpenSolaris[2] para arquitecturas IA-32 y x86-64 y es la primera distribución que combina Glibc con el núcleo de OpenSolaris y con las utilidades del espacio de usuario del núcleo (FUSE).
Nexenta Systems, Inc. ha iniciado el proyecto y patrocina su desarrollo continuado. Nexenta se basa en la distribución Ubuntu, pero el kernel que lleva ha sido sustituido por el de OpenSolaris, de esta forma se ahorra tiempo y recursos sin tener que crear otro software para el sistema base. Hay dos repositorios oficiales: “prueba” e “inestable”, que suman 12.222 paquetes y para el lanzamiento oficial se planea un tercer repositorio “estable”.
Está disponible en LiveCD, instalador de disco duro y en imagen de VMware. Los CDs del código fuente están también disponibles para la transferencia directa.
Puesto que Nexenta no utiliza el núcleo Linux y Sun Microsystems comenzó a lanzar el código de su sistema operativo Solaris, la ayuda para el hardware libre no es todavía tan diversa como otras variantes de Debian. Las versiones privativas de Solaris se han hecho para ser más compatibles con el hardware de Sun y los equipos basados en SPARC, mientras que falta el soporte en x86. Pero esta situación está cambiando rápidamente ahora que la mayoría del código base de Solaris ha sido abierta bajo la licencia CDDL de Sun y soporta los drivers binarios sobre una interfaz de aplicación binaria ABI estable. Esto hace legal que los fabricantes de hardware lancen drivers de dispositivo sin el código fuente.
Las últimas versiones soportan virtualización en kernel mediante Xen, sistema de archivos ZFS y deduplicación. Actualmente está descontinuado en favor de Illumos.

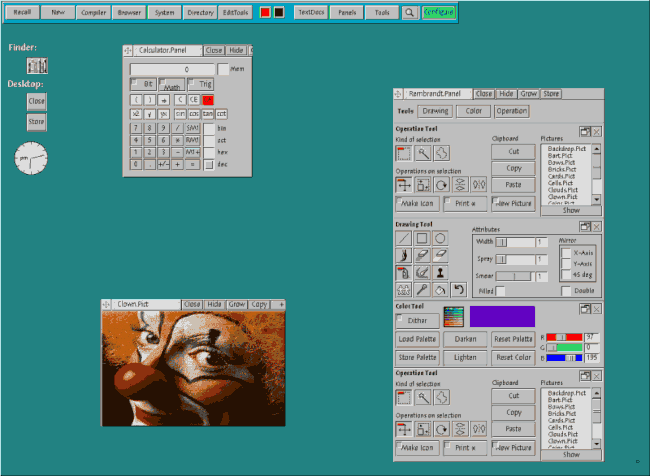
Oasis/TheOS
El sistema operativo OASIS (Online Application System interactive Software) de la compañía Phase One Systems, desarrollado por Timothy Williams, fue otro software multiusuario de 16 bit que fue muy popular en la década en los ochenta. Nacido en el año 1977, fue creado, como tantos otros, para el microrpocesador Zilog Z80. Se popularizó en la década de los años ochenta, y en 1982 fue reescrito en lenguaje C para ser incorporado a la arquitectura Intel 8086: En ese momento cambió el nombre de OASIS por THEOS. Destacó en el manejo de ficheros, al permitir etiquetar los archivos en niveles de privacidad como público, privado, o compartido.
Consistía en un sistema operativo multiusuario, un potente Business Basic/Interpreter, un compilador de C y un potente editor de texto.
El mercado pedía sistemas de 16 bits, pero no existía un verdadero sistema multiusuario de 16 bits.
Dados los innumerables retrasos en lanzar el producto, Timothy Williams afirmó que era el propietario de OASIS e inició un proceso judicial contra Phase One, reclamando varios millones de dólares. Tras 2 años de juicio se dictaminó que Timothy Williams podía desarrollar la versión de 16 bits de OASIS, pero que no podía seguir utilizando el nombre OASIS, momento en el que se le renombró a TheOS.
Pero hay otra versión, la de David Shirley, que decía que Timothy ya lo tenía y contrató a Phase One Systems para distribuirlo, pero esta empresa lo anunció prematuramente y OASIS aun no estaba optimizado. Esta situación llevó a Williams a sentirse insatisfecho con la empresa Phase One y a crear su propia compañía para comercializar y dar soporte al OASIS de 16 bits.
Sea como sea, los sistemas operativos THEOS fueron distribuidos por THEOS Software Corporation en Walnut Creek, California, desde 1983.
En 2003 Phase One Systems publica herramientas de desarrollo de software para sistemas THEOS(R). Además de las herramientas de portabilidad, Phase One Systems distribuye el paquete de consulta Freedom y el paquete de base de datos Control para sistemas THEOS, utilizados para aportar herramientas de extracción de datos similares a SQL a paquetes de software de terceros.
THEOS fue introducido en Europa por Fujitsu y otros fabricantes de hardware hace 30 años, y lo distribuyen varios distribuidores en Gran Bretaña, España, Portugal, Alemania e Italia, entre otros países. La versión "actual" es THEOS Corona Commercial Release 6, que se publicó en diciembre de 2008, y desde entonces se han publicado varias actualizaciones.
Algunas características son:
- Multiusuario de tiempo compartido
- Uso de controladores de dispositivos externos en lugar de un núcleo, lo que le permite ser más portátil a otros entornos.
- Lenguajes distribuidos con THEOS que incluyen THEOS Multi-User Basic y C. Se puede utilizar un potente lenguaje shell EXEC para la automatización de tareas o para producir un sistema llave en mano.
- Características de seguridad como contraseñas dinámicas, seguridad de permitir/denegar, un completo cortafuegos de entrada y salida, y una opción para requerir un cierto nivel de encriptación en la conexión de la estación de trabajo.
- Sistema de archivos propietario.
- Uso del "modo protegido" de Intel para aumentar aún más la defensa contra los ataques por desbordamiento del búfer.
systemstation.flounder.online/